


如何使用 HART手操器软件对HART智能现场仪表进行组态?
本文中,FieldIoT为您描述了如何使用HART手操器软件配置带有 HART 通讯器的2线制雷达智能HART变送器。本文使用的 HART手操器软件和现场通讯器为HandHeld1.4.2版本和蓝牙猫一个。在本文中,HART手操器软件将被称为“HART手操器软件”或者HART总线通讯器。有关 HART手操器软件操作的更多信息,请参阅用户手册或联系FieldIoT。
HART手操器软件中的菜单显示为编号列表。为了激活菜单项,您必须使用键盘并输入与菜单项关联的数字。例如,要选择菜单项“1 Device setup”,您必须按键盘上的数字 1。点击屏幕只会突出显示菜单项。
HART智能变送器的组态
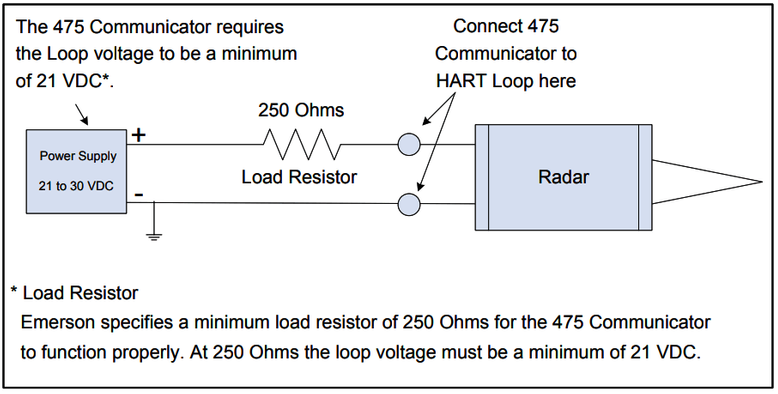
1. 将电源连接到启用 HART 的雷达发射器。图 1 显示了接线图、所需的负载电阻和环路电压。
如何使用 HART 通讯器设置智能变送器
注意:当您将雷达变送器连接到 PLC 或 DCS 系统时,系统侧已包含 250 欧姆电阻,因此您可以直接将 HART 通信器端子连接到变送器端子。仅当我们在校准实验室中使用电源单元为发射机供电时,才需要额外的 250 欧姆电阻。
2. 按住电源键直到电源键上的绿灯闪烁,打开 HART手操器软件 Communicator。
3. 从主菜单点击 HART 图标。 HART 图标可以在图 2 的左上角看到。
图 2 显示了HART手操器软件的主界面。
4. HART手操器软件将向雷达单元请求制造商代码和型号。如果在 Communicator 上安装了设备描述符,则该信息用于加载设备描述符。如果未安装设备描述符,HART手操器软件将使用 HART 通用和通用命令对雷达进行编程。
图 3 显示了未找到设备描述符时显示的消息。
HART手操器软件 未找到设备描述符文件时的通信器屏幕
图 3 显示了未找到设备描述符文件时的 HART手操器软件屏幕。
5. 点击屏幕左下方的“YES”按钮(图 3)继续。 HART手操器软件上显示的下一个屏幕称为“HOME”屏幕。图 4 显示了主屏幕。
主屏幕显示雷达校准值、目标距离和回路电流。图 4 中的主要变量 (PV) 是 3.442 英尺处的目标距离。 PV 回路电流为 19.507mA。 PV 下限值 (LRV) 和上限值 (URV) 代表雷达范围校准值。
HART手操器软件 HART 通讯器主屏幕
图 4 显示了主屏幕。
6. 主屏幕与雷达持续通信,提供最新的测量和回路信息。
另一个屏幕如图 5(最右侧)所示,可以按照所示的菜单选择来显示。
HART 通讯器主变量
图 5 显示了查看 Primary Variables 屏幕所需的菜单选择。
更改校准值
HART手操器软件提供多个屏幕和菜单用于校准雷达。可以使用菜单项“4 PV LRV”和“5 PV URV”或通过输入“1 Device setup”从主屏幕校准雷达范围。
从主屏幕更改范围很快,但选项有限。设备设置菜单提供对范围和其他可编程功能的访问。这两种方法都将在后面的正文中进行介绍。
本文末尾的附录包含本节中描述的每个校准更改的快速参考图。
从主屏幕更改校准值
7. 图 6(左)显示主屏幕。雷达范围可以通过选择菜单项“4 PV LRV”或“5 PV URV”来改变。
选择任一菜单项将导致 Communicator 显示范围校准屏幕,如图 6(右)所示。
HART 通讯器校准值
图 6 从主屏幕(左)选择菜单项 4 或 5 会使屏幕变为范围校准屏幕(右)。
8. 从范围校准屏幕(图 6 右)中选择菜单项“1 PV URV”将显示更改为编辑屏幕。编辑屏幕允许为 URV 输入距离,如图 7 所示。
HART手操器软件 URV 和 LRV 编辑屏幕
图 7 显示了 URV 和 LRV 编辑屏幕。
9. 输入所需距离时,请注意当前 URV 和 LRV(英尺 = 英尺)旁边显示的“测量单位”。输入距离后,点击“ENTER”按钮。
在将它们发送到雷达之前,更改不会生效。要将更改发送到雷达,请点击图 8 中的“发送”按钮。
HART 通讯器警告屏幕
HART手操器校准菜单
图 15 显示校准菜单(右)
雷达液位变送器 4mA 和 20mA 距离
图 16 显示了设置 4mA 和 20mA 距离时可用的选项。
19. 要将 4mA 或 20mA 值设置为当前距离,请从校准屏幕中选择菜单“1 Apply values”(图 15 右)。选择要设置的值(图 17 左)。
在以下示例中,将设置 4mA 距离值。设置 20mA 距离的过程是相同的。图 17(右)显示了选择 4mA 值时的结果屏幕。点击“确定”将显示图 18 中的屏幕。
HART手操器软件 Communicator的LRV编辑画面
图 17 显示 LRV 编辑屏幕。
HART手操器软件的 URV 编辑画面
图 18 显示了 URV 编辑屏幕。
20. 测量的距离显示在图 18 的顶部。要使用此距离,请选择菜单“1 设置为 4mA 值”。
如果距离不正确,请调整目标或等待目标距离达到所需值,然后选择菜单“2 读取新值”。菜单“2”将读取与雷达的新距离。请注意,设置 4mA 距离会导致回路电流变为 4mA。
HART手操器软件 中的警告屏幕
21. 更改雷达中的校准值可能会影响回路电流。可能会出现如图 19 所示的警告屏幕。点击“确定”以继续进行校准更改。
在 HART手操器软件上更改校准值后,必须将更改发送到雷达单元才能生效。图 20 显示了更改后显示的警告屏幕。
点击“发送”将在雷达中写入新值。点击“ABORT”将取消写入操作。
HART手操器软件中的警告屏幕
图 19 显示了 2 个警告屏幕示例。
HART手操器软件 通讯器校准值警告
图 20 显示了更改校准值时出现的警告屏幕。更改必须在生效前使用 SEND 按钮发送到 Radar。
非零状态屏幕
22. 当雷达中的校准值发生更改时,会在生成的 HART 状态代码中设置配置更改标志位。 HART手操器软件将检测到该标志并显示一个非零状态代码屏幕,如图 21 所示。
该屏幕确认雷达配置已更改。该标志将在发送到 HART手操器软件 通信器的所有状态代码中保持设置,直到 HART手操器软件 通信器通知雷达清除标志。
点击“是”可以忽略非零状态代码。
HART手操器软件 的非零状态屏幕
图 21 显示非零状态屏幕
查看校准设置
23. HART手操器软件提供一组菜单来查看雷达校准设置。从“设备设置”屏幕中选择菜单“5 Review”(图 22)。
查看 HART手操器软件 中的校准设置
图 22 显示突出显示的 Review 菜单项。
24. “Review”屏幕,图 23 提供了一个可滚动的校准值列表。
HandHeld Communicator 中的查看屏幕
图 23 显示了 Review 屏幕。
HART 通讯器快捷方式
范围值的捷径
如何在 HART手操器软件 中配置 URV 和 LRV
图 24 显示了更改 URV 和 LRV 的菜单选项。
通用校准值的菜单路径
如何使用 HART手操器软件 配置校准范围
图 25 显示了常用校准值的菜单路径。
4mA 和 20mA 校准的菜单路径
如何在 HART手操器软件 中设置 4mA 和 20mA 校准值
图 26 显示了 4mA 和 20mA 校准的菜单路径。图的下半部分说明了将 4mA 值设置为测量距离。